Dr hab. inż. Janusz Będkowski z Zakładu Technologii Inteligentnych IPPT PAN prowadzi innowacyjne badania nad zastosowaniem zrobotyzowanych mobilnych systemów skanowania 3D.
Systemy te mogą mieć bardzo szerokie zastosowanie m.in. takich dziedzinach jak: dziedzictwo kulturowe, zarządzanie środowiskiem, poszukiwanie i ratownictwo, kartowanie, robotyka, nawigacja, precyzyjne leśnictwo, górnictwo, edukacja, rozrywka, kryminalistyka, inspekcja infrastruktury krytycznej, eksploracja kosmosu, systemy ochrony, generowanie treści bliźniaków cyfrowych oraz automatyzacja w budownictwie.
Eksperyment w Parowozowni w Skierniewicach
W ramach najnowszego projektu, zrobotyzowany mobilny system skanowania 3D został przetestowany w Parowozowni w Skierniewicach. Celem eksperymentu było zweryfikowanie zdolności systemu do tworzenia dokładnej dokumentacji cyfrowej 3D obrotnicy oraz budynków parowozowni. Wyniki potwierdziły, że system sprawnie generuje cyfrową dokumentację 3D, która może być niezwykle przydatna w sytuacjach zagrożenia, takich jak pożar czy skażenie chemiczne, gdzie bezpieczeństwo pracowników jest priorytetem.
Zrobotyzowany mobilny system skanowania
System składa się z czteronożnego robota mobilnego Unitree Go2, który ma wymiary 70x31x40 cm i waży poniżej 15 kg. Robot może poruszać się z prędkością do 3.5 m/s, co odpowiada prędkości ludzkiego biegu. Dzięki zdalnemu sterowaniu i doskonałym właściwościom terenowym, robot skutecznie przeprowadził inspekcję Parowozowni w Skierniewicach (Fot. 1).

Fot. 1: Zrobotyzowany mobilny system skanowania laserowego 3D.
Robot wyposażono w mobilny skaner laserowy 3D MANDEYE-PRO, opracowany przez firmę MANDALA z siedzibą w Skierniewicach. Kluczowym elementem skanera jest głowica Livox MID-360 (Rys. 1), która charakteryzuje się zasięgiem do 70 metrów przy 80% odbiciu, błędem pomiaru wynoszącym 3 cm i możliwością rejestrowania do 200 tysięcy punktów pomiarowych na sekundę. Głowica waży zaledwie 265 g i jest zgodna z klasą bezpieczeństwa Class 1 (IEC 60825-1:2014).

Rys. 1 (po lewej) - Skaner 3D MANDEYE-PRO produkowany przez firmę MANDALA z siedzibą w Skierniewicach wyposażony w głowicę skanującą Livox MID-360, odbiornik GNSS oraz kamera 3600.
Rys. 2 (po prawej) - Laser firmy Livox MID-360 oraz wynik pozyskiwania danych 3D w ciągu 0.1, 0.2, 0.5 oraz 1 sekundy.
Wyniki eksperymentu
Podczas eksperymentu, robot poruszając się po terenie parowozowni, gromadził dane niezbędne do stworzenia mapy 3D, korzystając z ogólnodostępnego oprogramowania. Rezultatem prac jest dokładna mapa 3D przedstawiona w formie chmury punktów, co ilustrują załączone rysunki (Rys. 3,4,5).
Eksperyment zakończył się sukcesem, potwierdzając skuteczność technologii w tworzeniu precyzyjnych odwzorowań środowiska. Te innowacyjne rozwiązania mają potencjał do szerokiego zastosowania w wielu scenariuszach, zwłaszcza w sytuacjach kryzysowych, umożliwiając szybkie i bezpieczne zbieranie danych.
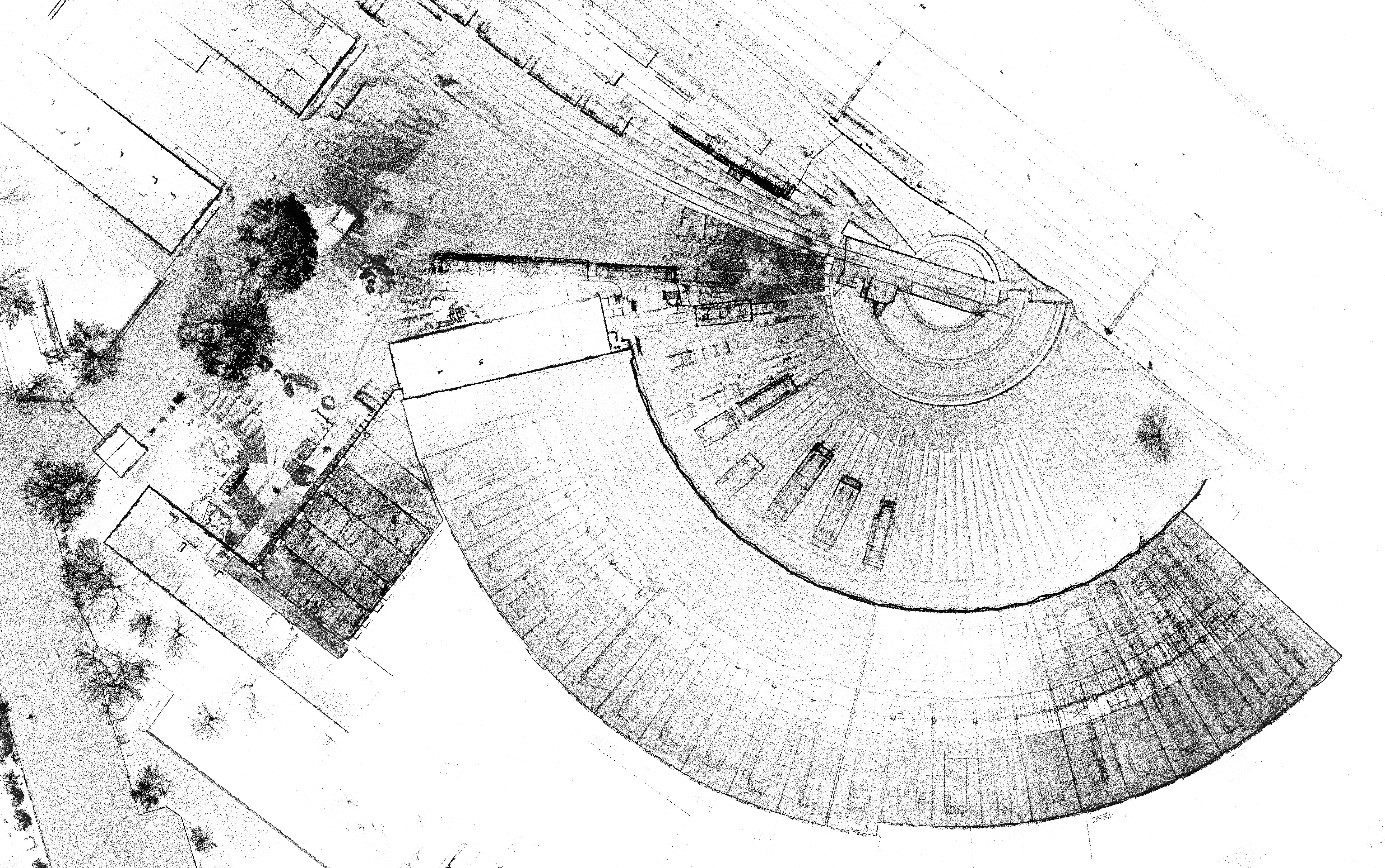
Rys. 3: Mapa 3D Parowozowni w Skierniewicach w postaci chmury punktów 3D – widok z góry.
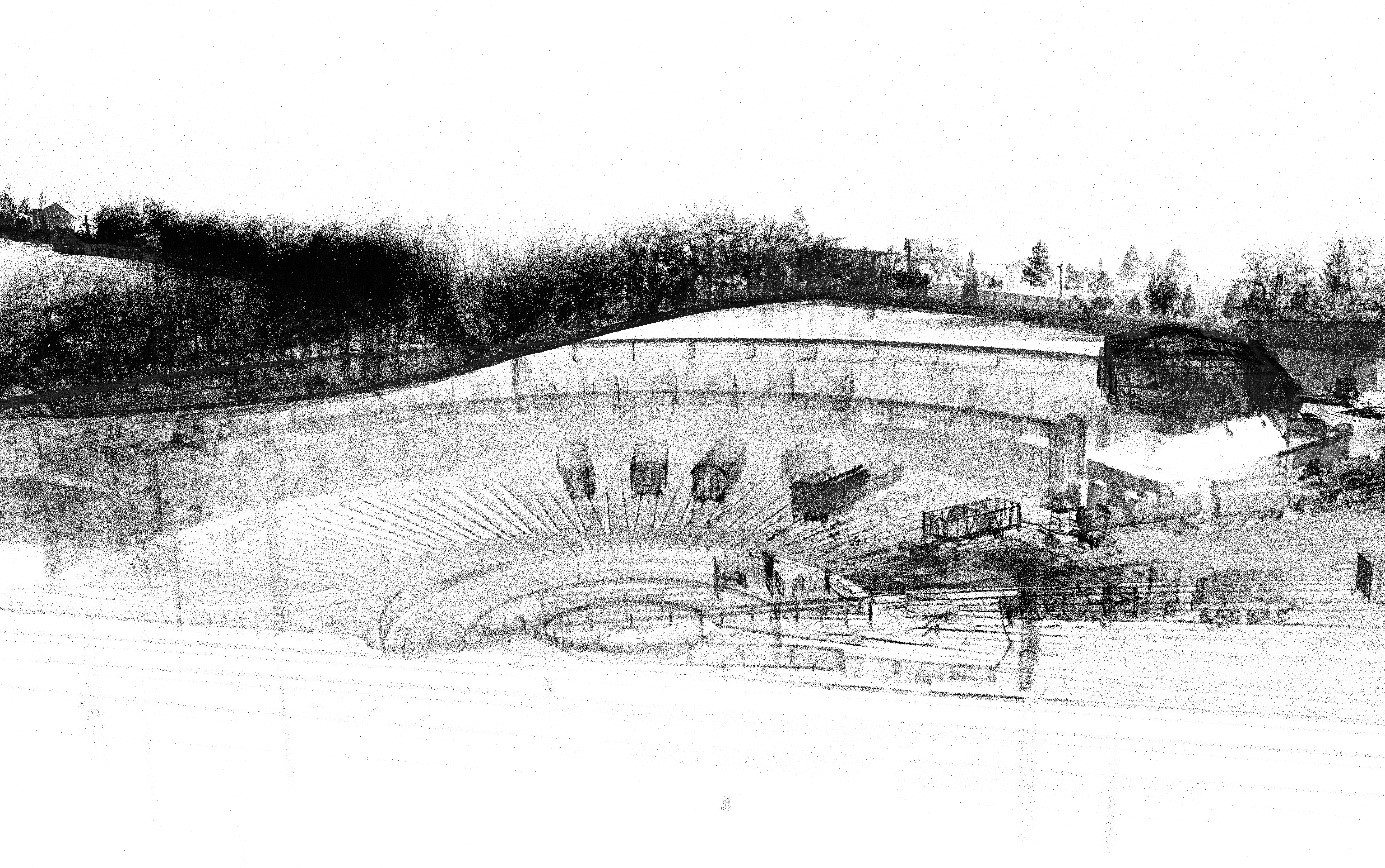
Rys. 4: Mapa 3D Parowozowni w Skierniewicach w postaci chmury punktów 3D – widok z perspektywy.
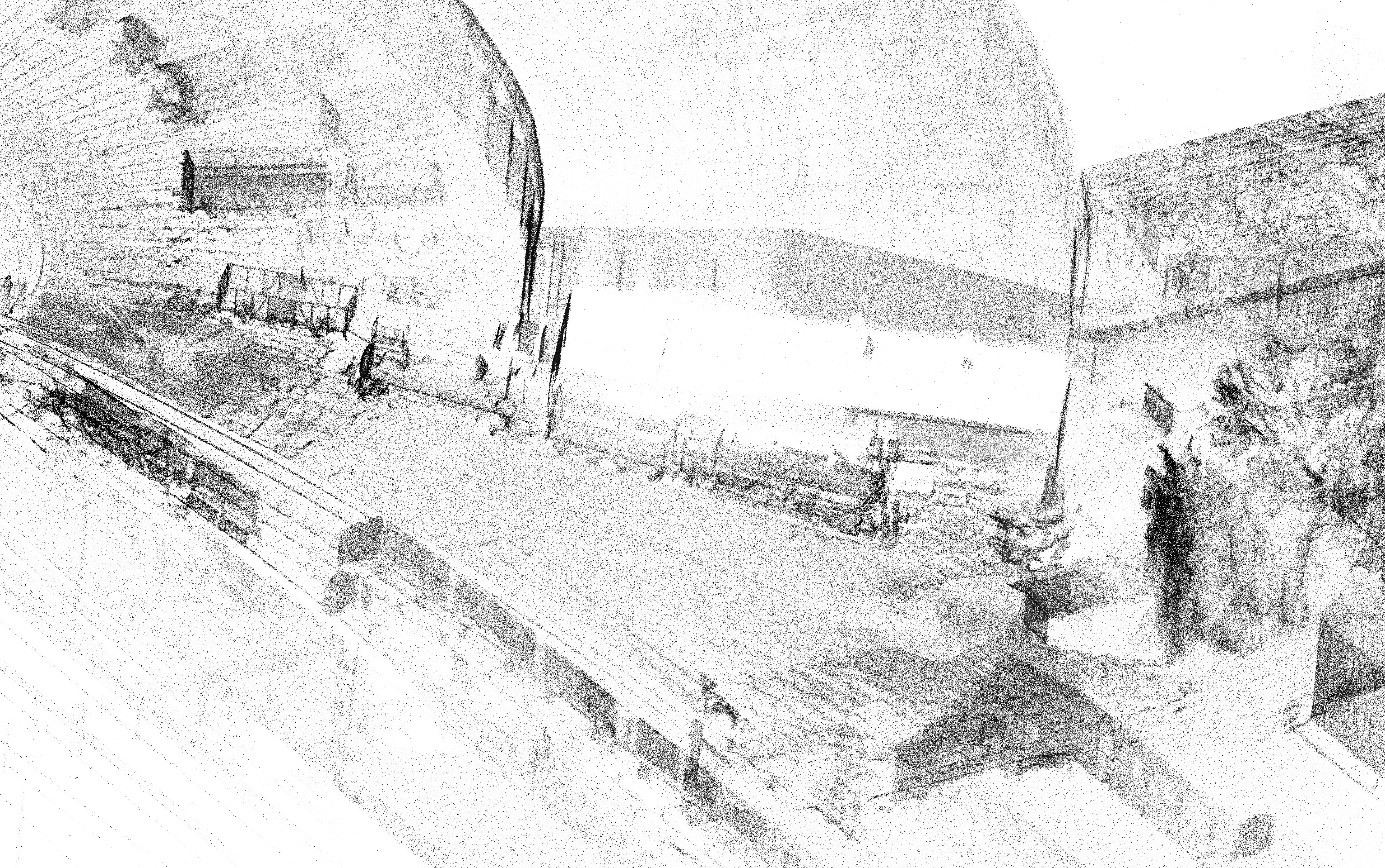
Rys. 5: Mapa 3D Parowozowni w Skierniewicach w postaci chmury punktów 3D – widok z perspektywy.
Autor pragnie złożyć podziękowania pracownikom Parowozowni w Skierniewicach za umożliwienie przeprowadzenia tego eksperymentu.
Przyszłość technologii
Dalszy rozwój technologii przewiduje zastosowanie technik sztucznej inteligencji, co pozwoli na autonomiczną pracę robota. Dzięki temu operatorzy będą mogli skupić się na kluczowych zadaniach, takich jak ratowanie zdrowia i życia, bez konieczności angażowania się w zdalne sterowanie robotem.
Badania prowadzone przez IPPT PAN to krok w stronę przyszłości, gdzie zrobotyzowane systemy skanowania 3D mogą stać się standardowym narzędziem w wielu dziedzinach, przynosząc korzyści zarówno w codziennej pracy, jak i w sytuacjach nadzwyczajnych.
Zapraszamy do literatury:
[1] Janusz Będkowski, Open source, open hardware hand-held mobile mapping system for large scale surveys, SoftwareX, Volume 25, 2024, ISSN 2352-7110
[2] Janusz Będkowski, Large-Scale Simultaneous Localization and Mapping, Springer, ISSN 2520-1956